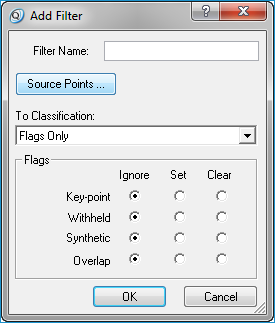

The Basic Filter point cloud task allows you to define one or more point filters and assign the set of points matching the point filter to a classification. A point filter is defined using the Display Filter Property Pages.
The Basic Filter is useful for conducting simple passes of data in a LIDAR project. Assigning noise points in the initial steps of a project is a simple but practical example. The filter can also be useful for swapping classifications of points. For example, placing ground points that are on a nonstandard class to the standard classification value of 2.