Point cloud datasets will at times have noisier than usual low/high point noise that will need to be classified/removed from the project data. This can be caused by: vegetation, site movement (conveyor belts), water presence, etc. LP360 and True View Evo contain multiple methods available for removing this noise that are reviewed below, which can be run individually or in tandem with one another: clip range, statistical noise point filter, height filter, and low/isolated points filter.
LIDAR Clipping – Clip Range
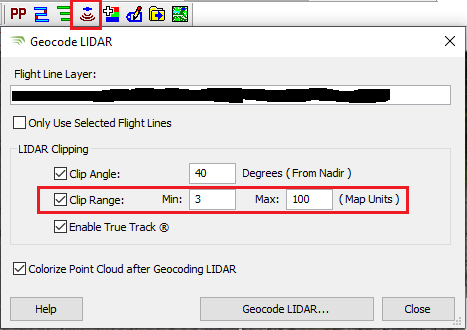
When initially geocoding data derived from a GeoCue True View 3DIS (3D Imaging System), the user has the option during geocoding to clip the range of points being generated, which helps eliminate potential noise that is close to, or distant from the sensor. When configuring, choose a relatively low minimum value and a maximum value based upon the flying height above the ground. All points within this designated range from the sensor are retained, points outside are not included in the generated point cloud.
Statistical Noise Point Filter
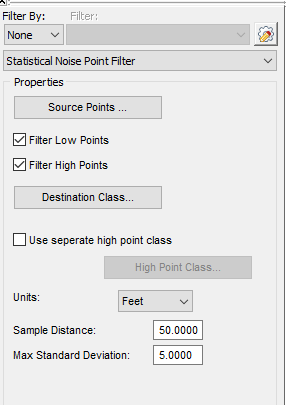
The Statistical Noise Point Filter Point Cloud Task (PCT) is a great tool for cleaning up both low/high noise, including noise close to the surface (ground). Brief review of sample distance and max deviation settings below:
- Sample distance setting refers to: The virtual grid size (in the X, Y plane) used for determining the sample for each statistical test. This number will need to be smaller for varying terrain, larger for flatter terrain. A larger sample size value considers more points when computing the standard deviation.
- Max Standard Deviation: This is the deviation value used as the threshold for classifying the noise points. The larger the value, the aggressiveness of the filter is increased and a larger number of points will be classified as noise.
Basic Filter – Classify by Elevation
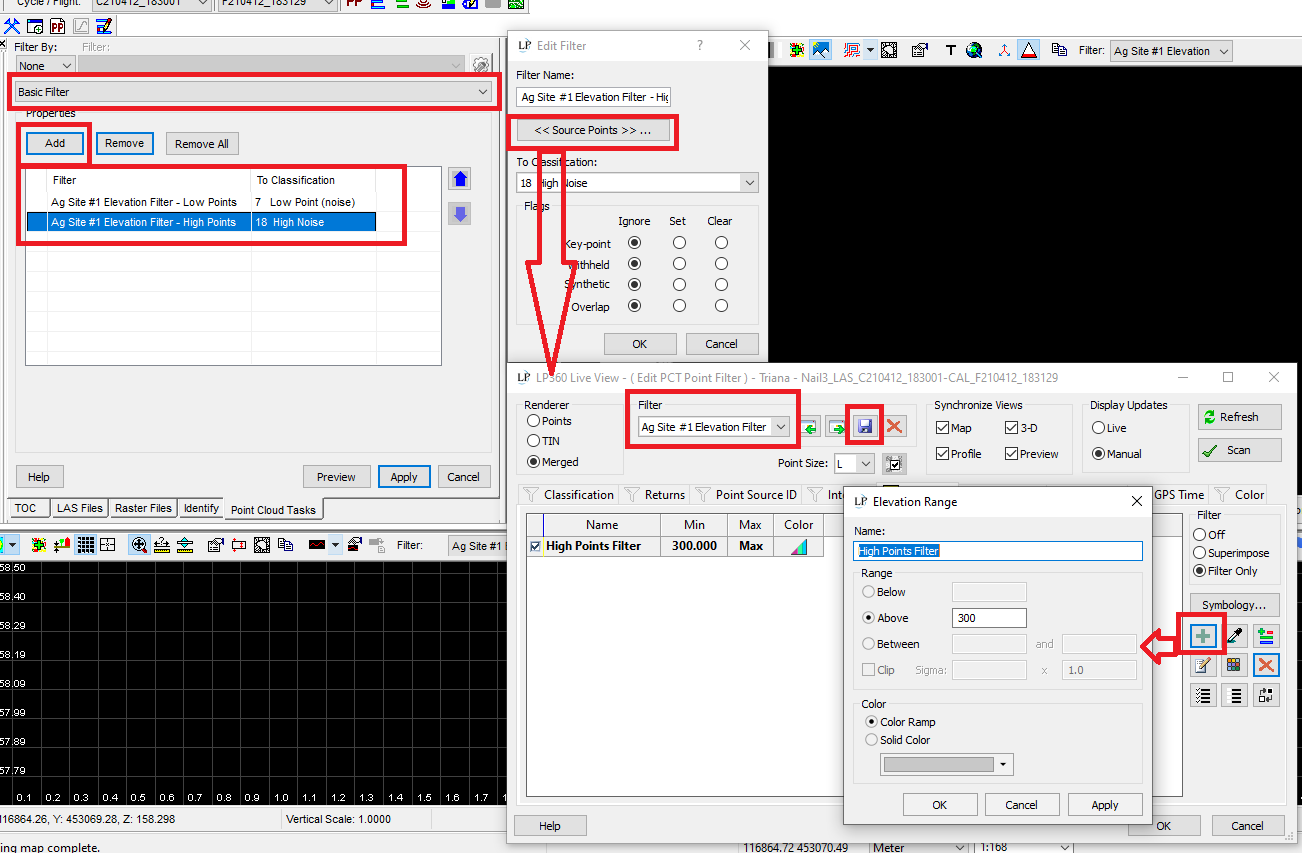
This filter can be useful for classifying low/high points that are below/above a specified elevation. The user will simply set the filter to classify all points as noise that are below a specified range of the ground surface and/or above a specified range of the tallest feature in the dataset. Ranges for low and high points can be set to run at the same time. Example of setup and settings below:
Low/Isolated Points Filter
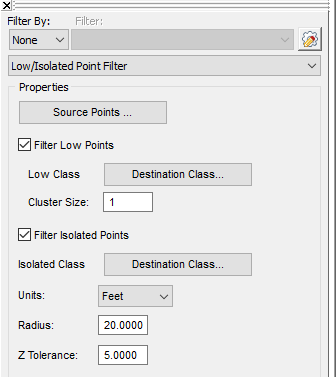
The Low/Isolated Points Filter is very useful for classifying stray single noise points (and noise clusters) that are present in the dataset. A brief review of the radius and Z Tolerance settings below:
- Radius: The radial distance from the current candidate source point to be used in the algorithm. A smaller radius generally results in more points becoming classified (since the current candidate point will be compared to fewer neighborhood points).
- Z Tolerance: The minimum vertical distance that a candidate point (or set of points up to the Cluster Size) must be below neighbor points to be considered a low point.
Manual Classification Tools
As a final step, LP360 has a wealth of manual classification tools that can be used in the map or profile views for additional refinement. These include: brush tools, above and below line, and polygon extent classification, etc. to name a few. Reference our Manual Classification Tutorial for additional workflow information and a brief overview of available tools.
