Originally posted on the GeoCue Group website on May 28, 2020
What causes “Noise”?
Drone LIDAR systems that use “automotive grade” laser scanners are known to be “noisy” as compared to a high end survey grade LIDAR such as those from Riegl. Part of this noise phenomenon is an illusion caused by close point spacing (Nominal Point Spacing or NPS). Small differences in elevation between closely spaced points is much more obvious (and objectionable) than the same elevation difference of sparsely spaced points. That said, these scanners are noisier than a survey grade system.
Data Smoothing Tool
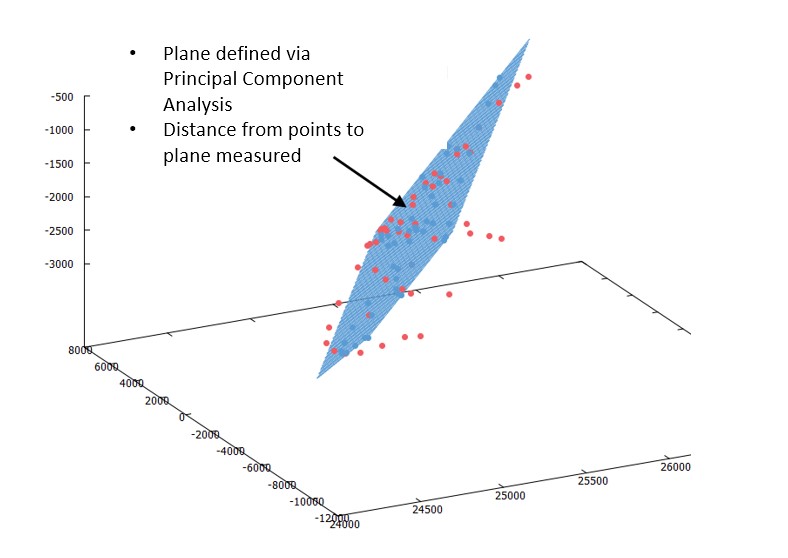
LP360 software contains a tool specifically designed to quantify this “hard surface” noise. The idea is that points that impact a smooth planar surface (regardless of surface orientation) should not deviate at all from that surface. Of course, in reality they will, even with a high end laser scanner. To quantify the degree of nonconformance (or “noise”) we construct the best fit plane to the points that impact the plane and then measure the standard deviation of the cloud of points from this plane (all automatically, of course!). This test is referred to as the “1 σ” test and is the standard way of measuring hard surface LIDAR noise. This test is illustrated in Figure 1.
We specify the True View 410 3D Imaging Sensor as having hard surface LIDAR noise less than 5 cm. This is actually pretty good – certainly low enough for any sort of topographic mapping work.
However, if you want to do work where noise can be objectionable such as profiling a road surface, what are your choices other than purchasing a survey grade instrument such as our soon-to-be-released True View 615/620? Ah, there is another approach!
Compress Noisy Areas
We have addressed this problem by adding a robust, adaptive smoothing algorithm to LP360 software (provided with every True View sensor) and to our LP360 point cloud processing software. This algorithm attempts to compress noisy areas of point cloud data without shifting the mean of the data (which is critical to maintaining network accuracy). The algorithm is quite effective. In Figure 2 is shown a cross section of a two lane highway imaged using a True View 410 3DIS. The point cloud is from the LIDAR sensor of the True View 410. The grid is a bit small in the view I have provided with each gird cell measuring 10 cm x 10 cm. Thus, you can see the vertical excursions of the draped profile are about 10 cm. Even though these data are a bit noisy, you can still very clearly see and measure both the crown and edge of pavement. Even so, you would like a “cleaner” data set for tasks such as this.

If we apply our new point cloud smoothing algorithm, we obtain the new data of Figure 3. You can see that the road profile now has been smoothed to the point of no obvious noise. This algorithm is constrained such that the profile of the smoothed data is not shifted from its original value. Thus this is a network accuracy preserving algorithm.

Our Smoothing Tool Leaves Fine Details Intact!
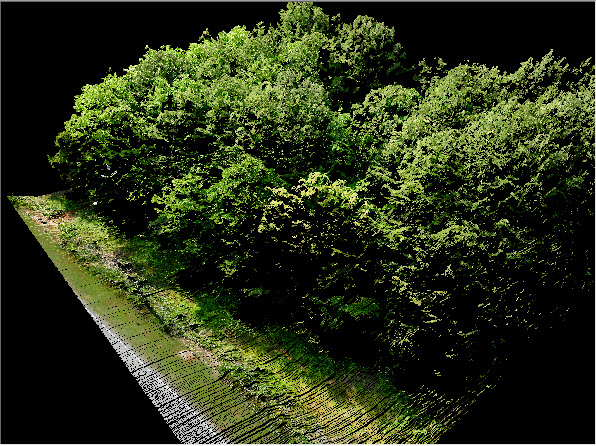
A final note on our new smoothing tool is that it preserves above ground features. Figure 4 shows a treed area of colorized True View 410 data after the smoothing tool has been applied. Notice the fine details of the tree branches and leaves has been left undisturbed by the smoother. This is extremely valuable from a return on investment point of view, since most noise reduction filters require that you do a tedious data classification prior to data smoothing.
This is another example of our focus on True View as an Ecosystem, not just a sensor. We are continuously adding tools to ease the use of the system while adding tremendous value to the products you can produce.
Webinar Recording
We hosted a live webinar demonstrating how to reduce noise in LIDAR point clouds using the LP360 smoothing algorithm. In this demonstration we show several examples of the smoothing using data from UAV LIDAR systems. Pros and cons of smoothing vs. thinning and using classified or unclassified points were also discussed.
