LP360 Cloud Ground Classification is a processing module on LP360 Cloud. It allows users to automatically classify the ground for data on the cloud. It can be used with any point cloud, however it has been designed for easy use with the TrueView 3DIS sensors. A user must be assigned an LP360 Cloud Starter license from the LP360 Portal to use the Ground Classification on the cloud.
For details on running the tool, please refer to How to use LP360 Cloud Ground Classification.
1. Method
A significant number of methods were introduced to solve the problem of ground classification of 3D point clouds. GeoCue developed its own method because none of them were found suitable to correctly classify a set of benchmark datasets that we assembled to cover the most difficult application (which includes cliffs, urban and forested areas). Four classes of methods were proposed in the literature and are implemented:
- Methods based on mathematical morphology are using structure elements and operators (openings) to delineate ground points. Structure elements can be determined in an adaptive way in the function of the local geometry of 3D points.
- Iterative densification methods are working from a set of seed points from which adaptive triangulation is built. Using certain acceptance criteria, points within each triangle are added to the ground class and another triangulation is built from the current and the new elements of the ground class.
- Iterative interpolation methods construct a global surface model that is used to compute residuals between the points and the surface model. If the residual is positive (i.e., points are lying above the global surface), their weight is discarded in the next global surface estimation. The global model used can be a Kriging interpolation method, Local robust least square models, etc.
- Segmentation-based methods classify a point cloud in regions sharing the same geometrical properties. Propagation of points is done by a region growing algorithms.
The methods found in the literature often offer good performances when used on simple datasets but may give irrelevant results on datasets containing challenging elements. This is the reason why we decided to develop our own classification method, which is based on both original strategies and well-known methods that proved their efficiency. The GeoCue algorithms can be easily customized for any type of acquisition system. Indeed, each acquisition system of 3D point clouds has its intrinsic level of random noise, the proportion of penetration through the canopy, and point density. These parameters may impact significantly the performances of ground classification methods. Our goal is to design a method that can be easily adapted to the acquisition system characteristics and that exhibit the same level of performance whatever the morphology of the 3D point cloud is.
The Ground Classification module aims at classifying a point cloud in two classes: ground and non-ground. This classification is both used as is in order to reconstruct the ground topography and as a basis for further classification of more precise elements (powerlines, roadways).
The points tagged as ground are supposed to be the points belonging to the bare earth. This means that points belonging to the low vegetation, or elements laying on the ground should not be classified as ground. However, we expect the tool to retrieve most of the ground points and not only the lowest part of the noise. Indeed, some of the ground classification tools available on the market are missing an important part of the ground points, especially in noisy datasets, because the method is focused on the lowest part of the points.
2. Optimal Context for Ground Classification
The Ground Classification module is meant to be used in any case where it is necessary to dissociate the ground from the rest of the LiDAR point cloud, for example for topographic applications. The ground classification can also be used as a preliminary step for other classification tasks, or to enhance the visibility of non-ground elements in the point cloud.
The points classified as ground might be used to produce a Digital Terrain Model (DTM) of the scanned surface, which can be used to compute the height-above-ground of the points, or any other applications requiring prior modeling of the bare earth.
The Ground Classification module is a tool of point cloud analysis. Consequently, it must be used on a clean point cloud that went through a complete geocoding and Strip Adjustment process. The classification obtained on point cloud with remaining systematic or punctual errors might be unreliable. In addition, note that this tool will most likely provide better results when used on a point cloud that went through the outlier classifier and smoothing. Consequently, the optimal input for the usage of the Ground Classification is a point cloud:
- geocode with a proper calibration
- on which Strip Adjustment has been applied
- on which the outliers classifier and smoothing have been used (after Strip Adjustment).
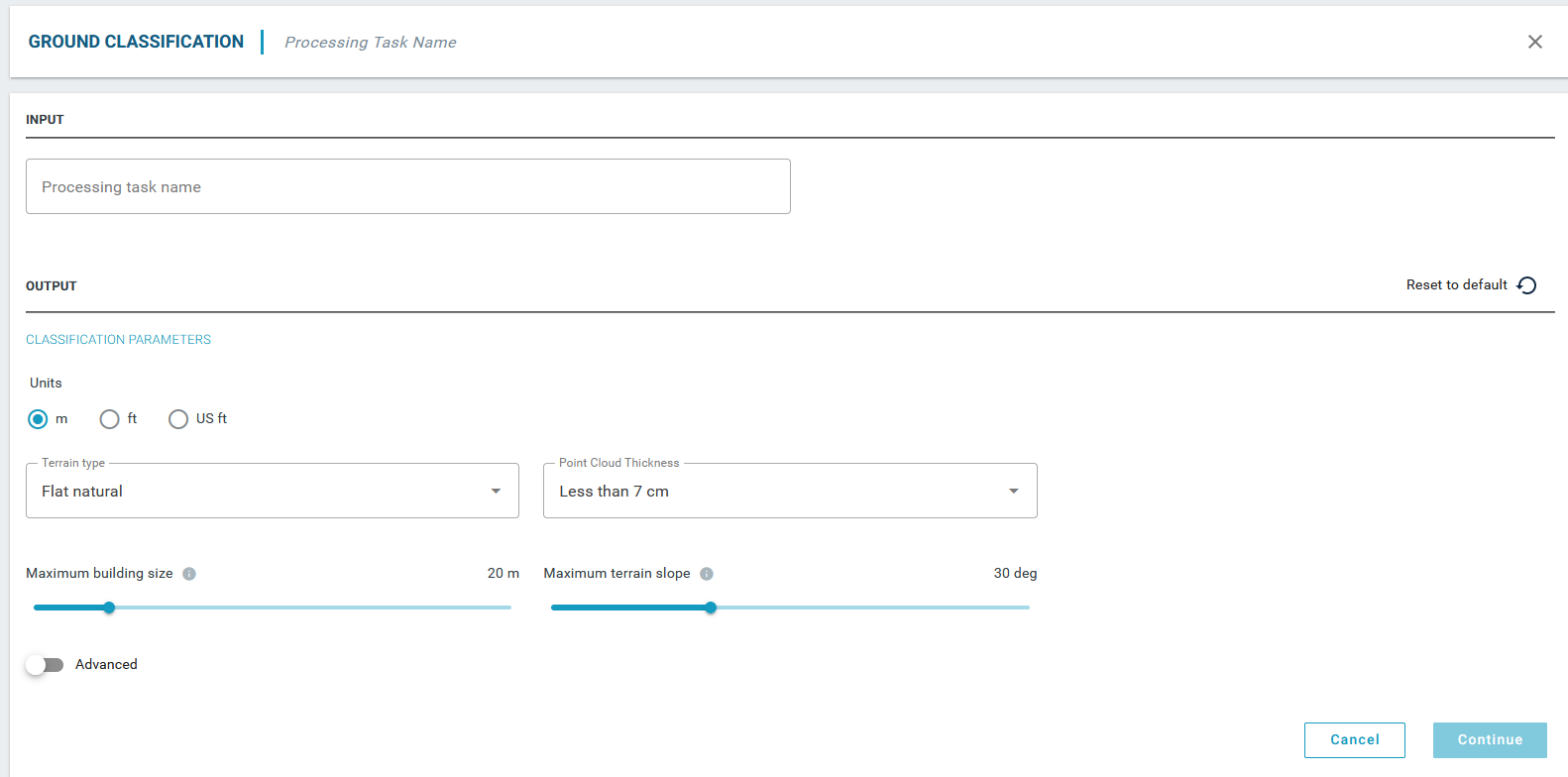
3. Processing Parameters
3.1. Terrain Type
In order to select the right Terrain Type, it is essential to quickly estimate the following characteristics of the point cloud to classify:
- the terrain regularity: a high regularity corresponds to a terrain with no quick terrain slope variation. It does not necessarily mean that the whole modeled area shares the same orientation, but that there are no sudden changes in terrain orientation. On the contrary, a low regularity terrain is associated with an area with a lot of slope variations (cliffs but also terrains with a lot of holes or high bumps).
- the terrain roughness: a terrain with a high roughness is a terrain where the regular surfaces are not strictly flat. It concerns for example natural surfaces such as naked fields or gardens with low grass, wherein the point cloud – the surface can be considered flat but with an important granularity. On the contrary, terrain with a low roughness is a terrain where the flat surfaces are strictly flat (roads, roofs, etc).
3.1.1. Flat Natural
The Flat Natural preset should be selected for point clouds covering areas with few to no man-made structures with not a lot of slope variations. It is good for terrains with a medium roughness and a high regularity. This preset is particularly adapted, for example, to natural scenes with some flat naked fields and no more man-made elements than a few roads.
3.1.2. Flat Urban
The Flat Urban preset should be selected for point clouds covering areas with man-made structures, where the ground surface has a low roughness and a high regularity. Additionally, a Flat Urban terrain should not contain a lot of vegetation.
3.1.3. Hilly Natural
The Hilly Natural preset should be selected for point clouds covering areas with few to no man-made elements, with frequent slope variations. It is adapted to terrains with a medium roughness and a medium regularity. Additionally, this preset is to be preferred for forested areas covering a ground surface of unknown regularity. The Hilly Natural preset is also the one to select for the least irregular mining areas.
3.1.4. Hilly Urban
The Hilly Urban preset should be selected for point clouds covering areas with man-made structures and some natural elements, where the terrain presents a low roughness and a medium regularity. In other words, this is the preset to choose for areas where the ground is artificially flat and regular but with some medium-level slope variations.
3.1.5. Mountainous
The Mountainous preset should be selected for point clouds covering mountainous areas. This corresponds to terrain with high roughness and low regularity. Any point cloud containing abrupt cliffs, where the cliff face shall be classified as ground, should be classified using this preset, as well as the terrains with a lot of slope variations. The Mountainous preset is also the one to select for the irregular mining areas, where the Hilly Natural one might not be sufficient to gather all the bare earth points.
For point clouds containing a mixed type of terrain, it is always preferable to select the more permissive type of terrain (increasing permittivity from Flat Urban to Mountainous).
3.2. Point Cloud Thickness
Average thickness (or noise envelope) of the point cloud in a flat surface.
Recommended value for TrueView 3DIS: “Less than 7cm”.
3.3. Maximum Building Size
The size of the biggest area of the dataset without any ground point in it. Every squared region of this size should contain at least one ground point.
3.4. Maximum Terrain Slope
The maximum slope of the terrain. This can be measured in the point cloud by identifying the steepest slope and measuring its angle with the horizontal.
3.5. Merge LAS Layers
This option can be used to assemble all the LAS layers into a single one before the processing. This option is activated by default because it is strongly recommended to assemble all the input LAS as a single point cloud before running the classification algorithm. This setting preserves the classification continuity between multiple LAS. The result files will still be multiple classified LAS Layers.
3.5. Advanced settings
3.5.1. Internal Segmentation
Maximum normal deviation
Threshold regulating the internal segmentation of the point cloud. Increasing the value makes the segmentation more tolerant to slope variations.
Maximum orthogonal distance
Threshold regulating the internal segmentation of the point cloud. Increasing the value makes the segmentation more tolerant regarding noisy points located far from the majority of the ground points.
3.5.2. Densification
Maximum angular deviation
Threshold regulating the densification phase of the ground points identification. Increasing the value makes the tool more tolerant regarding points far from the estimated DTM.
Maximum orthogonal distance
Threshold regulating the densification phase of the ground points identification. Increasing the value makes the tool more tolerant with points far from the estimated DTM.
