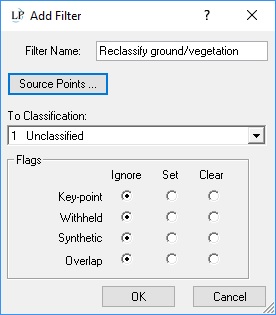
The Basic Filter Point Cloud Task (PCT) allows you to define one or more point filters and assign the set of points matching the point filter to a classification. This PCT is useful for conducting simple reclassifications of point data in a LIDAR project. Reclassifying points from the old Model Keypoint class 8 to the Ground class (2) with the Model Keypoint Flag set is a simple but practical example. The PCT can also be useful for swapping classifications of points. For example, placing ground points that are on a nonstandard class to the standard classification value of 2.