About Adding Tasks
You may add a new
point
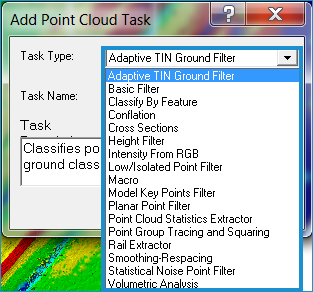
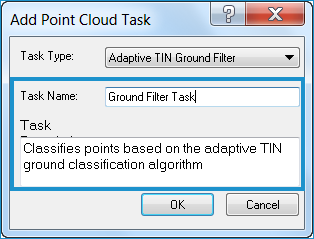
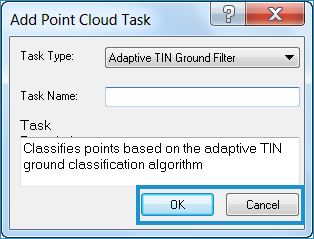
cloud task to the collection of tasks. Creating a new point
cloud task involves selecting the desired Task Type, and inputting
a name and description for the task. The list of Task Types is populated
from the registered point cloud task objects currently installed on
the machine. At the time of installation, LP360 will register the
following task types:
- Adaptive TIN Ground Filter Designed
to separate points that have a high probability of being ground
points from other points. The algorithm divides the task area
into cells for which X and Y dimensions are defined by a Seed
parameter. For each cell, a "best" candidate ground
point is selected. These "seed" points are then used
to construct a Triangulated Irregular Network (TIN). The algorithm
then iterates, attempting to add points to the TIN, based on several
inclusion criteria. The iterations conclude when either the user-specified
stopping criteria are met or no additional points are added during
the previous iteration.
- Basic Filter Classifies
points based on definitions of basic point filters. Practical
uses of this task include transferring or swapping points from
one class to another.
- Classify by Feature
Assigns classifications to points with a spatial relationship
to other features. You can use any vector layer in the map to
classify points that are within distances of linear or point features
or completely within polygon features.
- Conflation
- Collects the input required
to conflate elevation values
to vector data.
Cross Sections Generates
vertical cuts (cross-sections or profiles) of the point cloud
at a user-specified interval along a line ("alignment").
The cross-sections can be optionally clipped to a circumscribing
polygon such as the definition of the base of a stockpile.
- Height Filter Classifies
points based on the height from a ground surface. You can define
ranges to classify one or more height bins at a time. Practical
uses of this class include classifying points not in the ground,
or building classifications to low, medium, or high vegetation
classes. A more refined definition of height bins can be used
to summarize the point data
for use in vegetation-type models that use statistical metrics
of the point cloud.
- Intensity From RGB Synthetically
generates intensity values based on RGB values and populates the
Intensity field in the LAS file.
- Low/Isolated Point Filter Classifies
noise points based on if it is significantly lower or isolated
from its neighbors.
- Macro This is a
special instance of a point cloud task that is used to create
an ordered set of tasks that are executed over similar geographic
areas. An example of a macro task is the 'Default Building Filter/Extractor'
task that executes a building
filter first, then a building
extractor task second.
- With the Macro "task",
you can create your own set of ordered tasks.
- Model Key Points Filter
- Classifies model key
points into a separate class to reduce the source point density
based on a surface error model.
- Planar Point Filter Classifies
points by fitting points to user-defined planes, for example,
building rooftops.
- Point Cloud Statistics Extractor Extracts
point cloud statistics into geographic files. A practical use
of this task is to create automated QA reports of the point cloud.
- Point Group Tracing and Squaring Traces
outlines around point groupings and optionally squares the outlines.
A practical use of this class type is drawing outlines around
points classified as buildings and using the squaring option to
approximate the outline of buildings.
Rail Extractor Detects
and classifies rails based on detection properties that you define
in the Rail Extraction properties. "Seed" lines are
used to define the location of the rails.
Smoothing-Respacing
Smooths given geometry (lines or polygons) using the Douglas-Peuker
algorithm. The given geometry is respaced by adding or removing
points.
- Statistical Noise Point
Filter Used to find points that fit a "noise"
criterion. These points are then moved to the specified Destination
Class. The Statistical Noise Point Cloud Task is intended to be
used for smoothing near-horizontal surfaces, such as ground. It
could be applied following ground classification where the resultant
ground is "noisy" as a result of laser range precision
("noisy" range) or surface characteristics.
- Volumetric Analysis Computes
the volume difference between two TINs, as defined by a circumscribing
polygon and its LAS points.