We get a lot of questions regarding accuracy in drone mapping projects. These questions range from ground control layout suggestions to the necessity of calibration cameras. Sometimes it is useful to step back a bit and take a wholistic view of the elements that impact photogrammetric accuracy.
The information in this article is meant to be a thought exercise, not a mathematically precise discussion, of the elements that affect photogrammetric accuracy. I find it quite useful for making “rule of thumb” decisions regarding accuracy planning.
If we consider the triangle of Figure 1, we recall that given any two sides, we can solve for the third. Similarly, given any two angles, the third is defined.
Figure 1: Triangle Solution
We can think of the photogrammetric solution in this same way (see Figure 2). The elements that form the triad of the structure are:
- Exterior Orientation (EO) – The location (X, Y, Z) and orientation (Pitch, Roll, Yaw) of the camera for each image
- Interior Orientation (IO) – The intrinsic parameters of the camera(s) being used in the imaging operation such as the focal length and lens distortion; the camera calibration parameters
- Object Space (OS) – Known positions in the object space. The object space is what we are imaging (e.g. the mine surface)
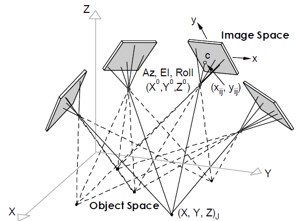
Figure 2: The photogrammetric “Triad”
In general, the more accurate I know two of these three sets of contributors, the less I need to know about the third and still achieve the desired project accuracy. The situation is, of course, much more complex than this but it does give you a good framework to discuss maintaining or improving accuracy.
Read complete article: The Accuracy Triangle – The Photogrammetric Triad
