Ground Classification with LP360 Drone is one of the software’s most common workflows and is required for several other PCTs to function, such as Tree Segmentation, Canopy Height Segmentation, and Building Extractors for dense datasets. For a general video tutorial of the LP360 Ground Classification workflow, please see the How to Perform Ground Classification in…
The Export Wizard provides a flexible way to convert LIDAR data to other formats. Such data includes the export format, extents, tiling of the data, or cookie cutting of the data using polygons. Derived attributes from interpolated elevations such as slope, aspect, and hillshade (brightness) can also be exported to raster files. LIDAR points within LAS files can also be exported to new LAS files. This is useful when isolating…
When using OneDrive for storing your Projects or processing, LP360 will have issues accessing the data files on OneDrive resulting in the software crashing. Probable Resolution Change your Project Root folder to a local folder location on your machine so future projects will not be created in the OneDrive location. Copy the Project Folder for…
This page is no longer updated. Please visit the updated page on the new LP360 Support Knowledge Base for the latest information. When running LP360 Drone (formerly TrueView EVO) and Applanix POSPac some antivirus, firewall, and other defender style software may interfere with processing and cause processing exceptions or slow license check in, or processing…
When working with orthos and other raster layers, it is important to be able to extract an area of interest (AOI) from the overall layer from certain projects. This is possible by using the Reproject Raster PCT. First, you will want to create a new project in LP360 and use the Add Files tool >…
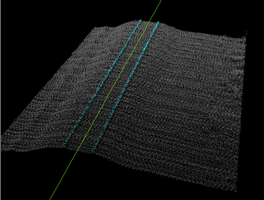
Introduction Three-dimensional point clouds of railways can be used to examine potential hazards along the railway infrastructure, identify track distortions and areas in need of maintenance. LP360 Drone includes tools to automatically extract a rail alignment (centerline) feature as a polyline as well as classify “top of rail” from LAS files derived from Laser Intensity Detection and Ranging…
LP360 Cloud Ground Classification is a processing module on LP360 Cloud. It allows users to automatically classify the ground for data on the cloud. It can be used with any point cloud, however it has been designed for easy use with the TrueView 3DIS sensors. A user must be assigned an LP360 Cloud Starter license…
1. Introduction LP360 Cloud Ground Classification is a module available in LP360 Cloud, starting in 2024, and can be used to automatically classify the ground for data on the cloud. In this article we’ll explain step by step how to use the LP360 Cloud Ground Classification module. Refer to the LP360 Cloud Ground Classification –…
In LP360 Drone, formerly called TrueView EVO, the user has a number of options for post-processing the sensor trajectory solution for a TrueView, microdrones, or guest sensor. Here is a quick comparison chart of the options. For more details on each method click on the name in the header to take you to their descriptive…
Attempting to run POSPacCloud to process a sensor trajectory solution in LP360 Drone results in an authentication failed error, “An error occurred running POSPacCloud.exe: C:\Program Files\Applanix\POSPac Cloud\POSPacCloud.exe AUTHENTICATION_FAILED The request was aborted: Could not create SSL/TLS secure channel. When installing LP360 an incorrect version of POSPacCloud was installed separately that was incompatible with the latest…