Problem:
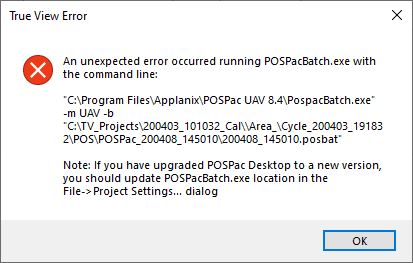
LP360 Drone errs with, “An unexpected error occurred running POSPacBatch.exe” while submitting Post Process Trajectory File to POSPac Local.
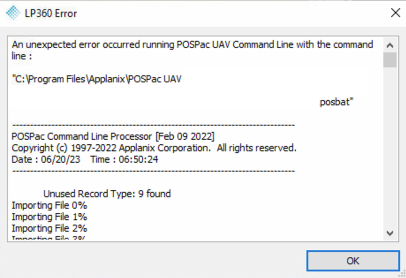
This is a generic unexpected error message whenever your POSPac project did not process to a successful solution using the InFusion Single Base processing mode and may be caused by one or more of the reasons listed below.
Probable resolution#6 below contains more detail on the logs to review when users encounter the “Execution_Failed” catch all error message when POSPacCloud was unable to successfully process a sensor trajectory solution and refers the user to “view the appropriate message log for details”.
Probable Resolution #1:
The unexpected error is a catch all for when POSPac does not successfully process a trajectory solution. The top reasons are:
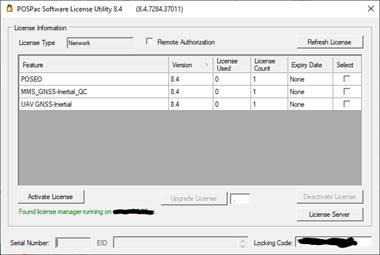
- No license available, open the Applanix Software License Utility and verify the machine being used to process can see the licenses being served by the Applanix license server machine on your network
- If this is the first time running POSPac on the machine, open the POSPac UAV desktop application and ensure it opens without error to ensure the installation occurred without any issues.
- Incorrect base station location, datum, or epoch.
- Project path length exceeds 200 characters, this error will be reported in the .posbat file towards the end.
- A user still has the POSPac Processing Offset (EVO -> File -> Project Settings -> EXP -> True View Experimental Settings) set to a large number (Default = 30s). The large offset number was necessary for v8.4-8.5, but is no longer needed with v8.6 or later.
- A user has installed POSPac v8.6 or later but is running a deprecated version of LP360 Drone/True View EVO.
- A user has installed POSPac v8.9 but has not yet upgraded their POSPac licenses to v8.9.
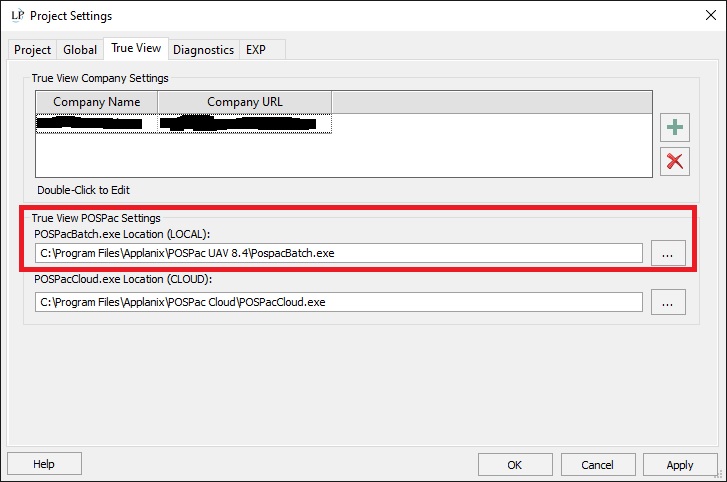
- A user has installed POSPac MMS instead of the POSPac UAV for which their licenses are valid. Verify the POSPaBatch.exe Location (LOCAL) is pointing to the POSpacBatch.exe in a “POSPac UAV 8.9” folder and not a “POSPac MMS 8.9” folder.
A myriad of other reasons may exist as well. Some indicators are provided in the log files generated by the processing attempt. See more details below:
Probable Resolution #2
POSPacBatch will exit with this unexpected error if the wrong file path was chosen in project settings for the “POSPacBatch.exe” file. This may occur if POSPac desktop version was updated on the machine. This is most certainly the issue if there is no path to a POSPacBatch.EXE listed in the error message and it simply says,” “” -m UAV -b… Detail: 87: The parameter is incorrect.”
Verify your POSPacBatch Location (LOCAL) is set. And even if it is, actually browse to and select the POSPacBatch.exe. Then try to process again.
Probable Resolution #3:
POSPacBatch may exit with this unexpected error if POSPac was recently updated while LP360 Drone was open. Verify the file path to the POSPacBatch.exe is correct. Close LP360 and reopen to remedy the issue.
Probable Resolution #4:
POSPacBatch may exit with this unexpected error if it is not licensed. That can occur if the program can’t find the local license, communicate with the license server, or the licenses are in use by another machine. Check license availability and settings using the Applanix Software License Utility.
More information on licensing POSPac can be found in Appendix A of the LP360 Drone Users Guide.
Probable Resolution #5:
Open a command prompt and type the command exactly as shown in the middle section of the error message Review the results shown in the command window. To make it easier, if you installed the POSPac in the default location, copy the contents of the following into a text file and save the text file as RunPOSPacBatch.bat on your desktop.
"C:\Program Files\Applanix\POSPac UAV 8.9\PospacBatch.exe" -m UAV -b %1 Pause
Once the batch file is created on your desktop, you can drag and drop the posbat file (located in the \POS\POSPac_YYMMDD_HHMMSS folder) onto the batch file and review the messaging being relayed.
Rover Data Not Supported: RINEX rover data is not supported
POSPac doesn’t like the base station RINEX file as it believes it to be kinematic. Verify the options and data used to create the RINEX file. One option to work around the issue is to “Force Static” when doing the import of this base directly in POSPac Desktop. However, if you can fix the base RINEX then you should be able to get LP360 Drone/TrueView EVO to successfully batch the processing.
Probable Resolution #6:
POSPacBatch may exit with this unexpected error if it cannot successfully complete the processing of the trajectory solution. Open the Batch Logs, Area\Cycle\POS\POSPac_YYMMDD_hhmmss\YYMMDD_hhmmss\YYMMDD_hhmmss.log, where the POSPac_YYMMDD_hhmmss is your last run attempt, and review at which stage the processing failed. There may also be a log in Area\Cycle\POS\POSPac_YYMMDD_hhmmss\YYMMDD_hhmmss.log with additional information.
POS Data Import: Pending
The program was unable to read the rover T04 file.
- Verify the T04 file copied correctly and completely off the UMS to the processing computer.
- Verify the POS data is from a TV410 3DIS with SN1010xx, or a TV 435, TV5XX, TV6XX or TV7XX system with the Classic business model.
extract_Mission 1.log
Look for “Termination Status: Fatal Errors” and “Extraction aborted”. If present, look earlier in the same log for a reason.
POS Data Import: Warnings
Broadcast ephemeris data download and import failed – When POSPac Batch is setting up the project it uses the rover data to download corresponding ephemeris data for use in processing. This requires a stable internet connection and space on the drive on which to download the files.
Base Station Import: Aborted
This error indicates a problem was encountered while trying to import the base station data. Review the logs for more information.
Base Station Import : Error in the application.
Verify you are running the latest version of POSPac UAV deemed compatible with LP360 Drone. An application error can be caused by some issues in the Applanix software that has been cleaned up in subsequent releases. The latest installer is available from the Downloads -> Software section when you login to your Reckon account.
Another root cause of the error in the application when importing a base station file to POSPac is if the approximate position in the RINEX header is zero. This can currently happen if you have provided more than one base observation file to EVO and it has to splice them together. It doesn’t always produce this error, but it can. The workaround in the short term is to open in a text editor the BaseObsSpliced.spl that EVO generates in the base subfolder of one of your POSPac processing attempts, and one of your input base observation files. Then, copy and replace the complete “ANT # / TYPE” and “APPROX POSITION XYZ” lines of the header from the original base observation file into the BaseObsSpliced.spl and save that as “BaseObsSpliced.obs” in a temporary location. Then, re-run the POSPac Wizard and remove the multiple base observation files, replacing them with the edited BaseObsSpliced.obs. Submit for processing and this second attempt should now process to completion if there are no other errors encountered.
bgpsconv_Mission 1.log
ERROR : Primary and base observables data time intervals do not overlap
POSPac found that the base station RINEX file did not completely cover the T04 from the rover.
- Verify the Time of First Obs through Time of Last Obs in the header of the base RINEX covers the time shown in the T04 as displayed on the first page of the POSPac Processing Wizard.
- Verify the first and last observation in the RINEX file match those in the header.
- Verify the observations exist in the RINEX file for the full extent of the T04 as displayed on the first page of the POSPac Processing Wizard.
Header: YYYY MM DD hh mm ss.sssssss GPS TIME OF FIRST/LAST OBS 2019 12 11 21 8 1.0000000 GPS TIME OF FIRST OBS 2019 12 11 21 8 1.0000000 GPS TIME OF LAST OBS
Observations: YY MM DD hh mm ss.sssssss ? Observed Satellites 19 12 11 21 8 1.0000000 0 14G03G14G16G22G23G26G31G32R01R02R08R10
Base Station Import: Pending
This unexpected error can occur if POSPac doesn’t like the base station RINEX file. Verify the options and data used to create the RINEX file. See the “Rover Data Not Supported” message explanation in probable resolution #5 above.
This may also occur if POSPac cannot open the RINEX file for read because it is open for read/write in another program.
POSPac will not import the base station RINEX file if there is no valid UAV-GNSS-Inertial license available. Open the Applanix Software License Utility and verify you have a valid license. See Appendix A of the LP360 Drone Users Guide for more information.
“pointID\\r\\nParameter name: Could not set the base station position because a station with ID ‘DEFAULT’ was not found in the project.”
Verify the base station being used for processing has a data interval of 1 second to match the processing rate on the True View POS system. A lower sampling rate may be rejected by POSPac and lead to no base being setup in the project, hence, no base station position can be set.
In addition to being 1Hz data, POSPac requires the base station observations be exactly on the one second interval. For Emlid receivers which typically record at some fraction of a second, it means using the Time Rounding option in Emlid Studio when converting the base observation file to RINEX.

POSPac also doesn’t like the base station RINEX file if it believes it to be kinematic. Search the RINEX observation file for the word “Kinematic” or “Marker” to see if they exist partway through the file, indicating the start of another observation.
Kinematic
Verify the options and data used to create the RINEX file. One option to work around the issue is to “Force Static” when doing the import of this base directly in POSPac Desktop. However, if you can fix the base file then you should be able to get LP360 Drone to successfully batch the processing. A specific example is the T04 file from a Trimble R12i base station with the INS enabled.
Marker
A known error due to a bug with TPS2RIN that happens periodically with the RINEX conversion of TopCon receivers which causes header data in the satellite range observation data. If you delete these lines, then your data should process normally.
Cannot find valid importer
Verify the version of the base RINEX file is supported by your version of POSPac UAV.
- POSPac UAV v8.4: RINEX version 2.11, 3.00 through 3.03
- POSPac UAV v8.5 – v8.7: RINEX version 2.11, 3.00 through 3.04
- POSPac UAV v8.8 – v9.1: RINEX version 2.11, 3.00 through 3.05
GNSS-Inertial: Pending
Most probable causes are:
- An incorrectly entered base station coordinate. Verify the base station value entered in LP360 Drone is correct. Signs are positive North and East.
- Verify the header of the base station RINEX file contains an approximate position that is close to the value entered, and correct, base station location. If the approximate location is more than 50m off from the real position the solution will have trouble processing.
Open the POSPac project found in the last Cycle_YYMMDD_HHMMSS\POS\POSPac_YYMMDD_HHMMSS subfolder and review the reports and settings in POSPac Desktop, if applicable, reprocess to obtain a suitable solution.
gnss_pp_proc_Mission 1.log
Look for “Termination status : Fatal errors”. If present, look below in the same log for a reason. Such as, “The position of the base station is more than 200m from the averaged single point positioning (SPP) solution.” See the most probable causes for “GNSS-Inertial: Pending”.
Look for “GNSS QC solution not available”. If present, check the extract_Mission1.log for more details.
fwdproc_Mission 1.log
Look for “WARNING : Gap in primary GNSS navigation data”. If present, check the extract_Mission1.log for more details.
Look for a “WARNING : Continuous primary GNSS position measurement rejections” and if present, review the Reference to primary GNSS lever arm values listed at the top of the report. Note those lever arm values are in meters. If the values are incorrect, you will need to fix those in the APX before you fly again. See Measuring GNSS Lever Arm Offsets in the True View 410 Hardware Users Guide.
To fix the processing for what you’ve already flown manually adjust the posbat file or use the GNSS lever arm override:
- Open the POSPac batch that is generated, for instance POS\POSPac_200427_114410\200427_114410.posbat
- Find the custom settings section that looks like this:
<CustomSettings> <PriGNSSLeverSD>SDLessthan3cm</PriGNSSLeverSD> <GnssReceiver>Primary</GnssReceiver> <IncludeHighRate>false</IncludeHighRate> </CustomSettings>
- Then modify it to look like this, ensuring you use the correct lever arm values in metres.
<CustomSettings> <PriGNSSLeverX>-0.008</PriGNSSLeverX> <PriGNSSLeverY>0.000</PriGNSSLeverY> <PriGNSSLeverZ>-0.436</PriGNSSLeverZ> <PriGNSSLeverSD>SDLessthan3cm</PriGNSSLeverSD> <GnssReceiver>Primary</GnssReceiver> <IncludeHighRate>false</IncludeHighRate> </CustomSettings>
- Re-run the POSPac batch file using the shortcut mentioned in the previous probable resolution.
- The report will be located in a subfolder, such as YYMMDD_HHMMSS\_CYYMMDD_HHMMSS\Mission 1\Report\report_Mission 1.pdf
- When you make trajectories the dialogue will ask you to browse for the POS\POSPac_YYMMDD_HHMMSS\YYDDMM_HHMMSS\_CYYMMDD_HHMMSS\Mission\export_Mission 1.txt file.
extract_Mission 1.log
Look for “# seconds data gap in GNSS navigation data.” or “Tracking only #sat SV in primary GNSS receiver”, where #sat is less than 4. If present, open the _CYYMMDD_HHMMSS.pospac POSPac project in desktop and review the following Display Plots for more details:
- Primary GNSS Navigation Data -> Altitude (m)
- Primary GPS/GLONASS Satellite Data -> Satellite Lock and Elevation -> GPS/GLONASS L2 Satellite Lock/Elevation
- Primary GPS/GLONASS Observables Data -> GPS L2 SNR
- Primary GPS/GLONASS Observables Data -> GLONASS L2 SNR
GNSS-Inertial: Aborted
This unexpected error indicates a problem was encountered while trying to process the GNSS-Inertial solution. Review the following logs found in the “Area_\Cycle_YYMMDD_HHMMSS\POS\POSPac_YYMMDD_HHMMSS\YYMMDD_HHMMSS\CYYMMDD_HHMMSS\Mission 1” for more information.
\Proc\fwdproc_Mission 1.log
- Review the forward processing log for fatal errors and the possible sources.
\Extract\extract_Mission 1.log
- Review the extract log for any data gaps or low number of satellites being tracked.
- Review the log for any warnings or fatal errors and the possible sources.
\Report\report_Mission 1.pdf
- The batch processing should have generated a standard POSPac Report PDF in this location that can be reviewed for any indicators of data issues that are preventing a successful trajectory solution.
Data Export: Aborted
The trajectory processing completed successfully, but something caused the export to the selected spatial reference system (SRS) to fail. Check for sufficient disk space.
Data Export : POSEO DLL Orthometric Height Error – This Point is Not Within the Geoid Region!.
The orthometric elevation could not be computed for one or more photo centers as the geoid selected on the POSPac Output Settings page does not cover all the data.
- Verify an appropriate geoid was selected for the region
- Verify the horizontal position of the data is correct and an incorrect base station, or other reason, did not result in a bad trajectory solution. There should be a POSPac Report PDF in the “Area_\Cycle_YYMMDD_HHMMSS\POS\POSPac_YYMMDD_HHMMSS\YYMMDD_HHMMSS\CYYMMDD_HHMMSS\Mission 1\Report\report_Mission 1” folder for review.
Probable Resolution #7:
Create a ticket with GeoCue Support and upload the POS folder to your folder on our FTP site for further analysis.
